About me
Psychiatry Resident at Nuvance. MD graduate of Albert Einstein College of Medicine and a recent graduate of the Certificate in Premedical Sciences program of Columbia University. I am interested in the application of mathematics and technology to medicine and am a current researcher in the Crary Lab at Mount Sinai studying applications of machine learning in neuropathology. I have previous research experience in Combinatorics and Astrophysics. I worked as a software engineer in scalable data infrastructure at a native advertising start up called Triplelift. I also write poetry, music, and short stories.
Bragging Rights: I…
- Submitted a Correction to AMBOSS
- Made this website and my wedding website
- Own my very own canoe
- Love my pets and travel with them
- Collect old books1,2,3,4,5 and other old things
- Made a ton of origami1,2,3,4,5
- Love to bake1,2 and grow plants with my partner
- Published my poetry in the Einstein Ad Libitum1,2 arts journal
- Once wrote a book of lessons to teach my friend how to program in Java (who is now doing very well working as a software engineer)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Coursework Projects:
Computational Neuroscience 2018
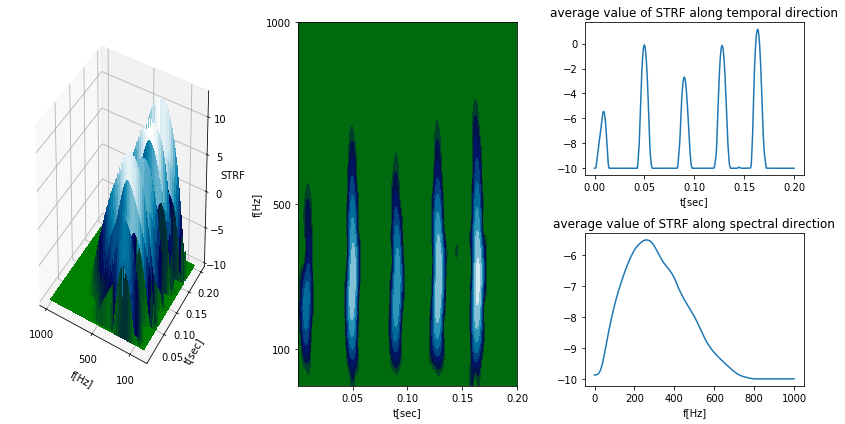
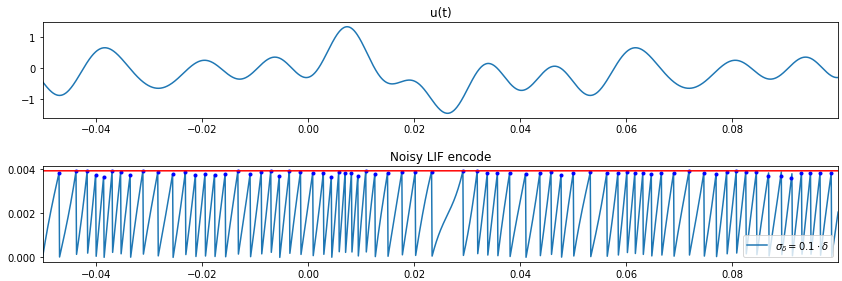
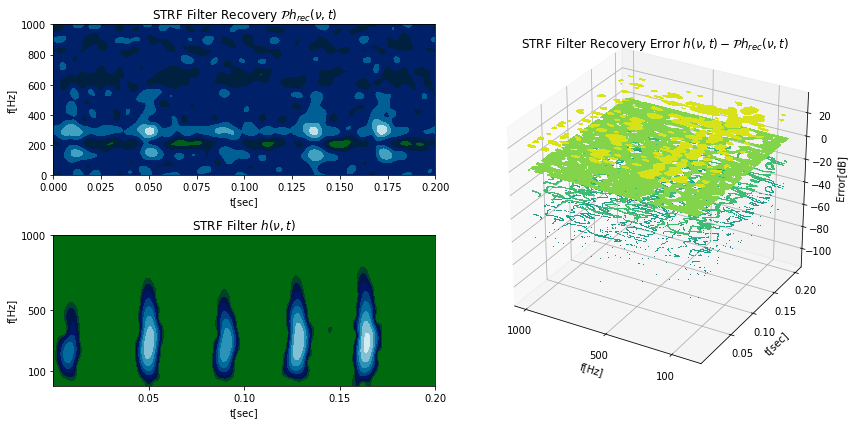
In one of my favorite classes we were asked as a final project to create a neural encoder utilizing a spectrotemporal filter and array of Noisy Leaky IAF "trigger and fire" neurons. The leaky IAF is an encoder of a signal into a train of spikes that is meant to approximate the traditional Hodgkin and Huxley neuron quite well by preserving the nonlinear nature of the Hodgkin and Huxley neuron without the sacrifice of needless computation time. In this way neurons translate amplitude signals into a frequency based sampling space. 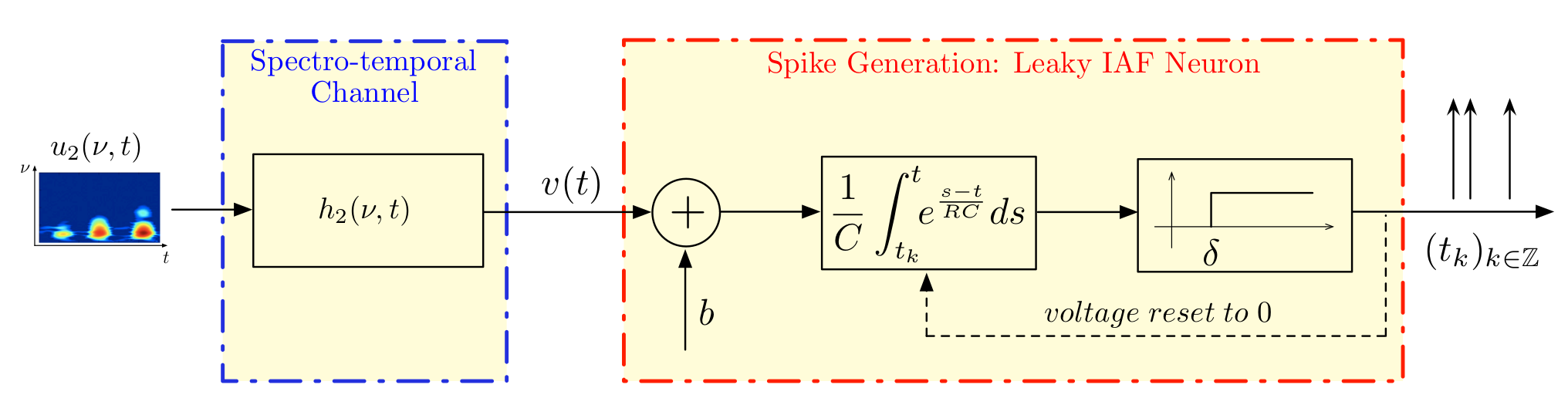
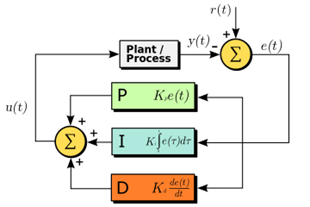
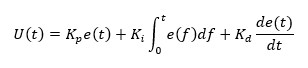
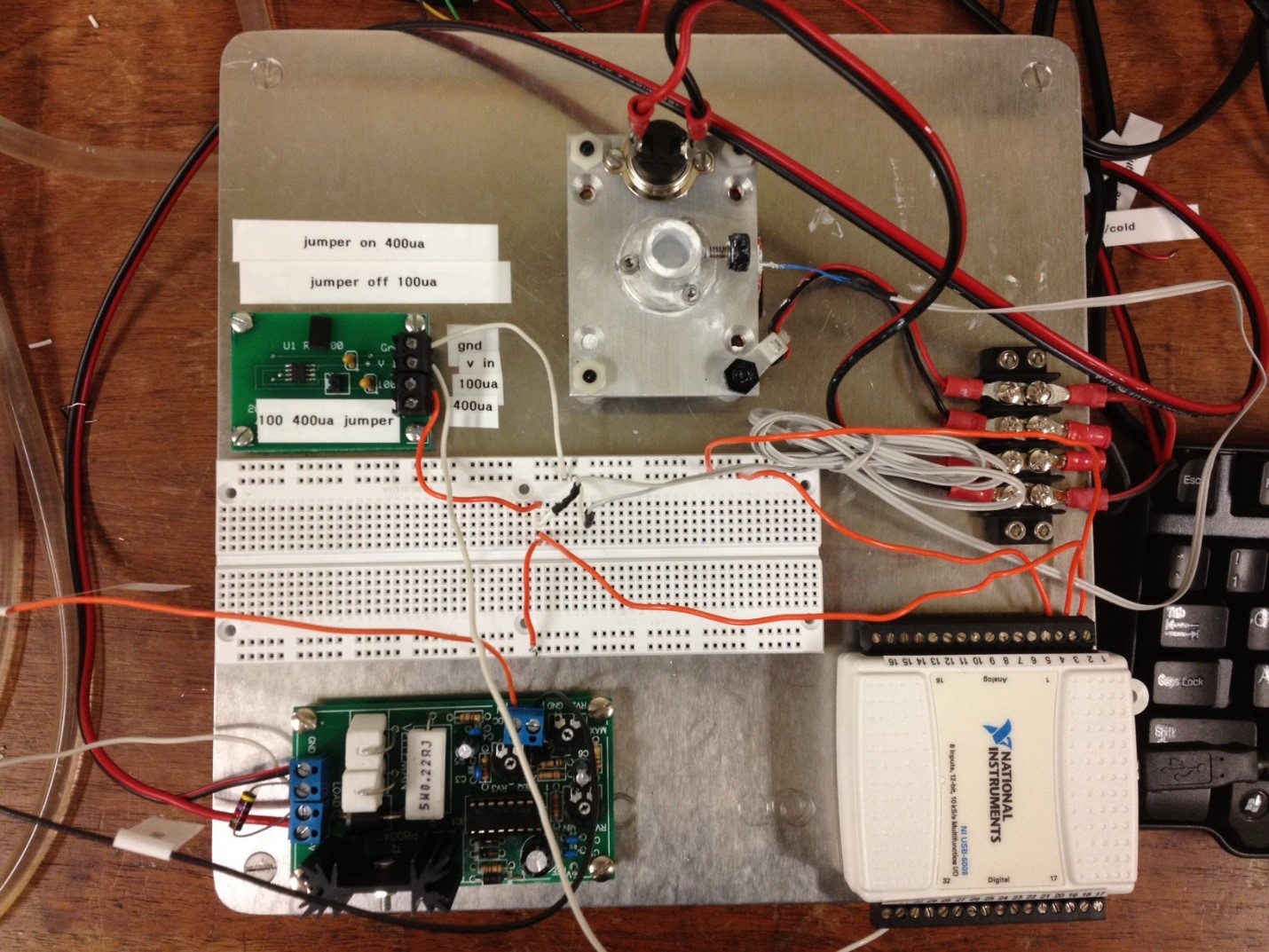
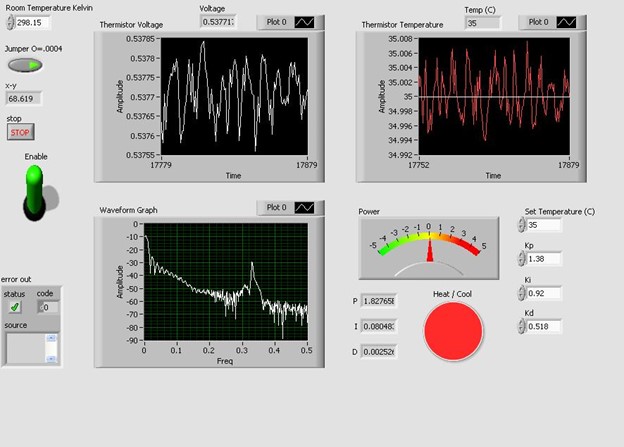
Advanced Physics Lab 2013
In one of my favorite experiments way back in college we were tasked with building a PID controller. The idea behind the PID controller is that you have a real value you want your program to accomplish but you only have access to some kind of power which moves you in the direction of that real world value. In the real world things like momentum, resistance, and error complicate problems and simply setting your power proportional to the difference between your desired real world value and the current one doesn't work optimally. Take for instance an air conditioning unit. The AC unit only knows different power settings, what the current temperature is, and what the desired temperature is. If it rapidly cools down a room to a desired temperature it may overshoot. The process of optimally approaching a given value is far more important when applied to autopilot systems or robots used in surgery.